| | | |
Cuda & Sunguidance Video Flights - March 19,2005
 |  |  |  |
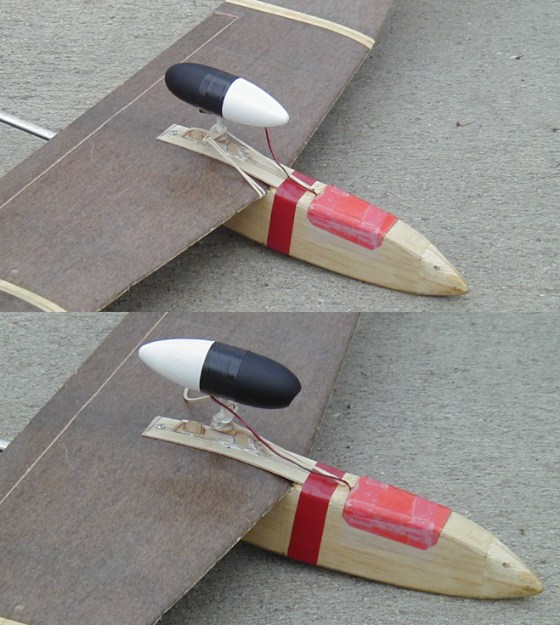
| Flights at the March Birmingham Rocket Boys Launch, at the Phoenix Turf Sod Farm. It was a mostly overcast day, though the sun broke out a few times. The wind was about 5-10 mph. In some scenes an orange tape can be seen along the launch area. That is not a landing "runway" line. It is for the launch area, so pads go on one side and spectators stay on the other side. The Cuda-Flap model's Gearcam video system was upgraded a lot since the February flights. The very draggy mount that pointed the camera upwards, into a rotating mirror, and which also carried a 9 volt battery in the airflow, was replaced by a mount to rotate the camera 180 degrees horizontally. The camera inside is mounted to look a few degrees down rather than perfectly straight back or forward. The rotating pod consists of some modified 29mm tubing, a piece of Centuri #10 tubing (to hold the Gearcam) and a couple of 30mm vac-formed nose cones. One of the cones was painted black inside and out to shield the camera from reflected light. It was triggered by the same sort of retracting pin method as before, driven by the flap servo. I had originally thought of removing the flap servo and putting in some means for a servo to directly (and slowly) rotate the camera pod 180 degrees, but that proved to be far more easily thought up than worth working all the bugs out.
The 9 volt battery as used before was replaced by a 7.4 Volt (2 cell) 145 mAh Lithium-Polymer battery pack (though the packs only have tested out to around 80-90 mAh). Each cell weighs 3.5 grams, so an assembled 2 cell pack weighs about 8 grams. The Gearcam actually runs off of regulated 5 volts, I modified my Gearcam to replace the original connector (which has a small 5V regulator in it) and add my own 5V regulator (7805 IC). I found out in testing that the Gearcam and the model's R/C gear could not share the same battery source, as the servo motion would affect the camera's video signal. So, a second Li-Poly pack was used to power the R/C gear, with another 5V regulator added. The two Li-Poly battery packs weigh about the same as the 50 mAh Nicad pack usually used for S8 type models like the Cuda, so the only electrical increase in mass was due to the 5V regulators, about 3-4 grams grand total. The Gearcam weighs about 10 grams, and the rotating pod mount weighs about 14-15 grams, so the net added weight to the model is about 1 ounce, or about 28 grams, from when the Cuda has been flown without the video system and using 50 mAh nicads. The rotating mirror mount and 9 volt battery flown in February had added about 2.25 ounces to it, the extra weight and extra drag could really be noticed in the boost and in the reduced glide performance. With the new rotating pod mount and Li-Poly batteries, the boost altitude was much better and the glide was so much better that only a stopwatch would have shown the difference between the new Gearcam system onboard and flying the model "clean" without it. |  C6 Staging |
| Flight #1 - However, it almost didn't get a chance to show how well it boosted or glided. On the first flight, using staged C6's, it pitched up and got out of control. Unlike most R/C RBG's, the Cuda-Flap model's thrustline produces a little bit of up pitch on boost, rather than down pitch. Also, with the engine mount behind the CG, flying it staged means it is particularly tail heavy at liftoff, so it is more touchy until it stages. I had made some modification to the transmitter programming the night before, and somehow the boost mode/glide mode switch got it's programming reversed. So, the model took off with significant up elevator trim (meant for glide), and the servos were at high rate (meant for glide) rather than boost elevator trim and low rate. It ended up doing a loop, missing the ground by about 20 feet or so. In the February videos, it had been surprising to see how much the tailboom twisted. Well, on this flight the tailboom twisted incredibly for a few moments. After the boost ended it was hard to get the model trimmed out, as I was trying to adjust glide trim while the transmitter switch reversal meant that the "up trim" for glide was not enabled. I did finally realize that for whatever reason the up trim for glide was enabled with the switch in boost mode, so left it there and finally landed it safely. The video is of the boost only, 320 x 230 resolution, a 1.1 meg Quicktime movie | 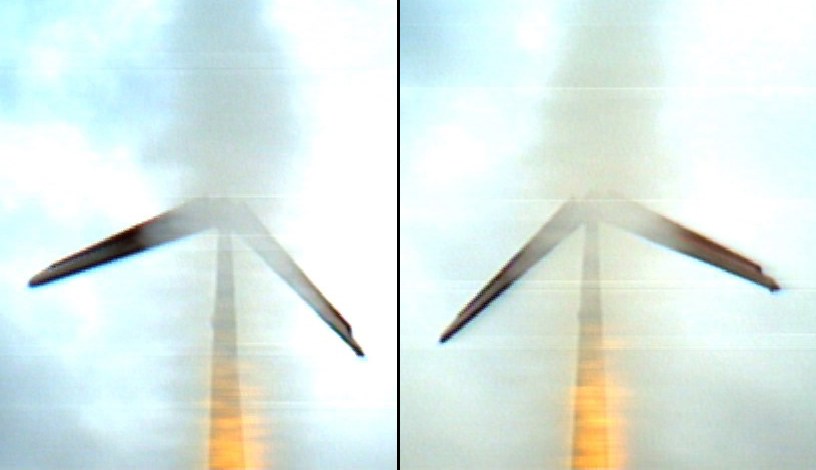 Tailboom twist during loop |
| Flight #2 -After sorting through things in the transmitter, the second flight was made on a single C6. I didn't run video, flew it using a 50 mAh Nicad pack for R/C only, to save the Li-Poly packs' charges for later flights. The flight boosted fine, and after sorting out the trims on the transmitter it was realized the bird was actually a hair tail heavy, so a bit of clay was added to the nose for the rest of the flights. | |
| |
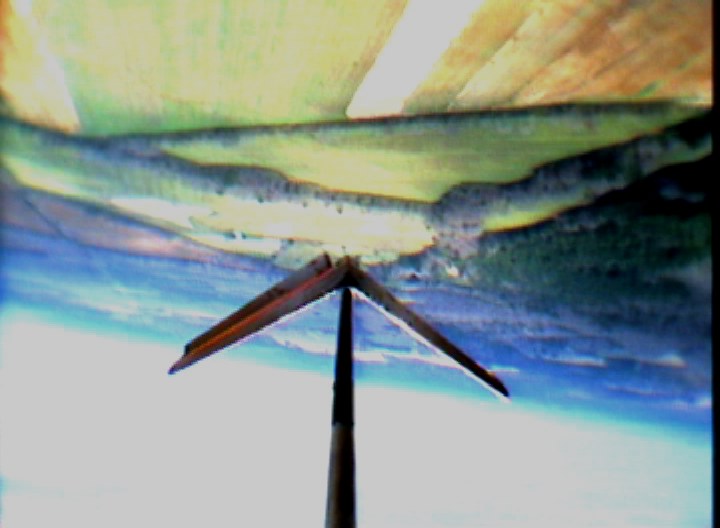
| Flight #4 - Flew on an E6 reload. It boosted nicely, and the video stayed good throughout the boost. Made a bit of a roll correction during the boost, then decided before burnout just to roll it the rest of the way, which turned into a barrel roll transition into glide. During glide, did some loops and barrel rolls. Unfortunately, the camera pod didn't rotate to look forward, the rubber band got hung onto a little piece of plywood near the retracting pin on the fuselage. Due to the steady headwind, I made a long landing approach that looked like the model glided a lot slower than it really does. Tried to catch it, but it ballooned up at the last moment. That would have looked so nice if the camera was facing forward, but having read this keep that in mind as you see the landing sequence in the video.
The video shows from lifotff to landing, with some sections cut out for time, 240 x 170 resolution, a 2.8 meg Quicktime movie |
| Flight #5 - The last Cuda flight of the day was on a D7 reload. A good boost, a bit of aerobatics, and near the end there at the BRB launch area there was a drag race of a couple of models that happened to work out for the Cuda to record them taking off.
A big surprise in reviewing the video was that for a very brief time on boost, the camera pod rotated about 90 degrees, then rotated back to a rear view. Strange. I noticed on a few occasions in other boosts where the tailboom seemed to move a bit from left to right, that probably was the camera pod mount rotating a tiny bit. It also seemed to occur a bit during some forward looking parts of the glide, when pulling high speeds or dives. Some tweaking of the rotating pod system seems to be in order. The video shows from lifotff to landing, with some sections cut out for time, 240 x 170 resolution, a 1.7 meg Quicktime movie | |
| Sunguidance |
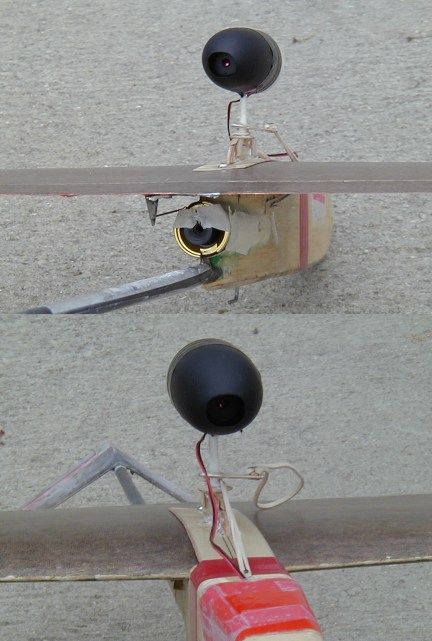
| Two Sunguidance flights were made. Now, Sunguidance does not need the sun, in overcast skies the model will fly generally straight up, biased a bit towards a brighter part of the sky. But I wanted for the sun to be out to get the desired flight paths. Fortunately, the sun did break though on several occasions, though at varying intensity due to haze. The Sunguidance flight at the SEARS launch was overcontrolled, the model zig-zagged back and forth very quickly. That was partly due to larger nose control fins, so a new set was made that was the size of the most commonly flown previous fin sets. But most importantly due to the Bertha type nose cone which had the sides nearly parallel where the photoresistor sensors are located. So, after only a few degrees or pitch or yaw, one side of the nose cone would get shaded and therefore drastically affect the movement of the nose section control fins. So, that was simply fixed by replacing the Bertha type nose cone with a Shuttle SRB type nose cone. That meant it would not track the sun quite as sharply as before, but well enough. It caused less movement of the control surfaces for given amount of error in degrees, so it would tend not to overcontrol . As would be shown in the flights and onboard video, the changes made the model fly a LOT smoother. | 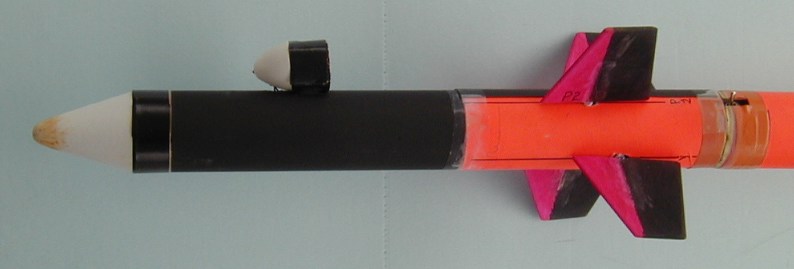 SRB type conical nose (camera removed) |
|
Flight #1 - Three stage, D12-0/D12-0/D12-7 (Chad Staged). Have not used that engine combo a lot, but it is about the most interesting, other than an E6. Fortunately he wind was coming from nearly the same direction as the sun, so when the model flew towards the sun it would be giving itself more room to drift. Had the wind blown the opposite way, I'd not have been able to 3-stage it without concerns of drifting off of the field. The sun elevation was something around 50-60 degrees at the time (made the Sunguidance flights after the 3rd Cuda flight). The model was aimed at about 30 degrees from vertical, downwind, and opposite of the sun.
At liftoff, it held the original launch angle, then started to pitch to vertical, It staged just about at vertical, then pitched more to lock onto the sun (well, the weak sun). The third D12 ignited and boosted it more. In reviewing the video, the model response was pretty smooth once locked onto the sun. The video is from liftoff to chute deploy, 320 x 230 resolution, a 1.2 meg Quicktime movie | |
|
Flight #2 - Three stage, D12-0/D12-3/D12-7. Yes, I said D12-3 as the second stage engine. By the time of this flight, the sun elevation was around 40 to 50 degrees. The sun was out better for this flight than for flight #1. The liftoff and climb was pretty much like the first flight.
At burnout of the second D12, the D12-3, the model started coasting. It nearly got to horizontal, but not quite, when the D12-3 ejection went off to ignite the D12-7. When the D12-7 ignited, the model then climbed back up towards the sun. That pretty much followed what I had expected, I'd been thinking about doing something like that before but with a longer delay such as 5 seconds rather than 3. I'll probably try that out later on, as well as adding an E9 sometime in place of a D12. One of the chutes failed to deploy, but the model landed safely on one 18" chute. Turned out the other chute was not tangled, it needed more airspeed to make it pop open so had the other chute not opened, that one probably would have. This is why I use two chutes on models like that, they are too important to use a single chute with. The video is from liftoff to chute deploy, 320 x 230 resolution, a 1.8 meg Quicktime movie | |
![]()